
Autonomous Parachute Systems




Over the past four years Dr. Fields has been developing an autonomous circular parachute aerial delivery system. The initial reversible reefing system is shown on the right during drop testing.
Current deployment methods use an Arcturus T-20 UAS, single engine aircraft, or a multirotor UAS.
Results have shown potential for using descent rate control to modify the landing location. Current work is investigating alternative approaches to manipulating the parachute size/shape. Simulations using real wind data have demonstrated the capabilities that the system is capable of greatly improving landing location accuracy (when compared with an uncontrolled canopy).
Recently, the PaAVS lab has been developing an instrumentation suite capable of wirelessly and non-invasively measuring canopy suspension line loading during inflation and terminal descent. The current prototype load cell/amplification board is shown on the right. The device works by changing suspension line geometry slightly. During loading, the tension in the line pushes on a cantilever. The cantilever deflection can be measured with strain gauges, and transmitted over Bluetooth to a host device for storage.
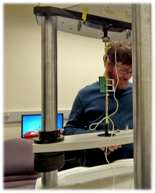
Testing has been conducted on both a Bose Electroforce load frame, as well as on an actual parachute (with up to eight load cells mounted on the parachute). Current work is seeking to improve the PCB design and microcontroller software in order to collect more accurate and faster load distribution data.
Wireless, Non-Invasive Load Cell for Parachute Loading