Multirotor Design, Simulation, and Testing
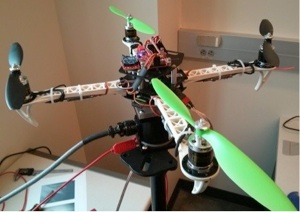

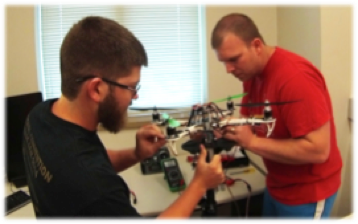
Recently, the UMKC curriculum made a shift to require Mechatronics System Design (ME 457). To provide students with an educational, exciting, and relevant course, the PaAVS lab in conjunction with the Human Motion Lab (HML) are developing new methods for rapid design, simulation, and testing of autonomous multirotor vehicles.
To aid in rapid development, autopilots are created in the Arduino programming environment. Making code modifications easy and quick.
Once the student developed autopilot has been tested in the PaAVS and Instrumentation lab, students will test their vehicle in the HML. The HML provides indoor GPS to the vehicle, allowing for full 6-DOF autonomy.